

 QQ
QQ
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
发那科机器人主要参数介绍
重复定位精度、可动范围、手部负载,这些术语究竟代表些什么?本篇将要介绍的是发那科机器人的主要参数,看完后相信你会对机器人参数不再陌生。
使用机器人时应保证机器人的负载条件在手部允许负载线图所示范围内。机型不同,法兰盘不同,其手部负载条件不同。详情参阅相关手部允许负载线图。此处以R-2000iB/165F,ISO法兰盘为例:
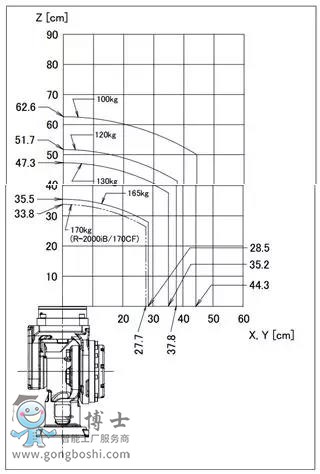
图一:手部允许负载线图(R-2000iB/165F,ISO法兰盘)
发那科机器人有2轴、3轴、4轴、5轴和6轴机器人。

各机型的J2机座/J3手臂/J3外壳上的负载条件请参考其机型机构部操作说明书。此处以R-2000iB/165F为例:
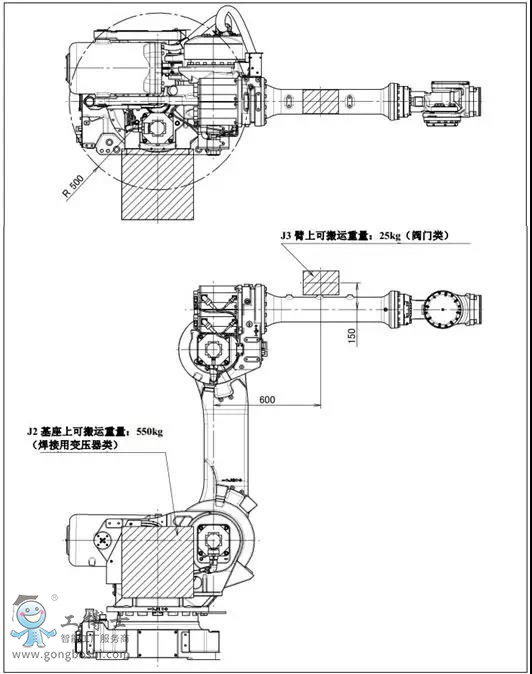
图二:J2机座/J3手臂部的负载条件(R-2000iB/165F)
各控制轴上,分别设有原点位置和可动范围。各轴都在可动范围的两端进行超程检测。为了进一步确保安全,还提供采用机械式制动器的可动范围限制和采用限位开关的可动范围限制。另外,请勿进行机械式制动器的改造。否则可能导致机器人不能正常停止。各机型的可动范围请参考其机型机构部操作说明书。此处以R-2000iB/165F的J1轴、J2轴和J3轴为例:
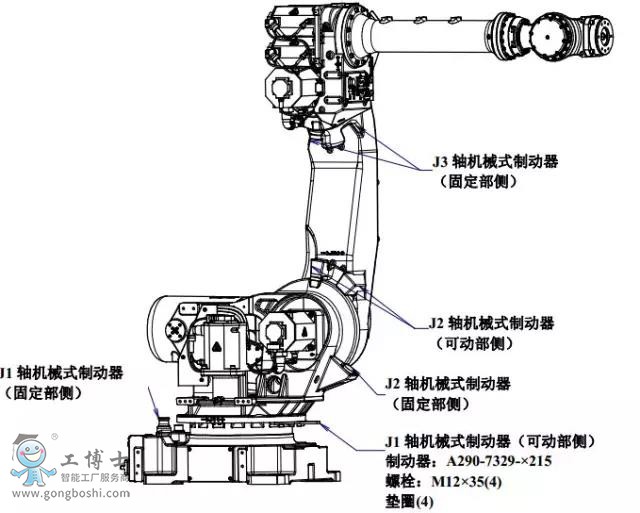
图三:J1、J2、J3轴机械式制动器位置(R-2000iB/165F)
机器人的安装方式有:地面安装,顶吊安装,高台安装,倾斜角安装。具体机型的安装方式详见其机构部操作说明书。
此处列举部分机型的安装方式:
地面安装:R-2000iB/165F;顶吊安装:R-2000iB/150U;高台安装:R-2000iB/200R;倾斜角安装:LR Mate 200iD
注:倾斜角安装时,部分轴的动作范围会受到限制。详情请与本公司洽询。

重复定位精度指的是机器人重复到达一个位置的精度。各机型的重复定位精度请参考其机型机构部操作说明书中的规格一览表。此处以LR Mate 200iD为例:LR Mate 200iD的重复定位精度为±0.02mm。
*大动作速度指机器人运动时各轴所能达到的*高速度。各机型各轴的*大运动速度请参考其机型机构部操作说明书中的规格一览表。 注:短距离移动时有可能达不到各轴的*高速度。此处以R-2000iB/165F为例:

更多资讯:发那科机器人


