

 QQ
QQ
利用iR PickTool对跟踪系统进行调试,步骤如下:
1.示教用电脑的设定
(如果使用教程调试器,则不需要此步骤)
在红外拾取工具中,当通过计算机设置红外拾取工具时,需要对计算机进行设置。
设置计算机上的IP地址,确保教学计算机上设置的IP地址与机器人控制器的IP地址在同一网络段
更改Internet Explorer设置,将机器人控制器的IP地址设置为连接到一个受信任的站点
更改Windows防火墙设置,使机器人控制器通信不受Windows防火墙的限制
2.机器人间的通信设定
(如只有一台机器人,不需要该步骤)
在使用iR PickTool跟踪时,机器人控制器间会存在大量的信息交换。如果发生通信延迟,会影响系统的性能。因此,机器人间的通信是由机器人控制器间建立的本地网络构成,不会受到其他通信的通信量影响。构建机器人间通信设置时,需要注意以下事项:
IP地址的设定中,需要对各机器人控制器定义不同的机器人名称
IP地址的设定中,需要使机器人间的通信所使用的端口IP地址设为连号
使用以太网编码器时,必须使连接脉冲编码器的机器人控制器的IP地址在前头
3.脉冲编码器的连接和设定
在安装脉冲编码器时,注意脉冲编码器的安装位置不会对机器人产生干扰,不会进入相机的视场。相比与主动轴和从动轴的脉冲编码器直接安装在传送带上,旋转磁盘安装在前端编码器的旋转磁盘直接接触旋转的传送带,可以更准确地测量传送带
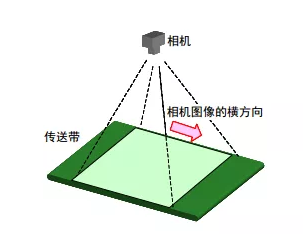
4.相机的连接和设定
(仅视觉跟踪,队列管理跟踪时不需要该步骤)
在相机上安装镜头,设置于传送带上方,使相机光轴与传送带表面垂直。设置相机时,使传送带的传送方向与相机图像尺寸较大侧相同。确保相机在传送带传送方向上视野宽敞。
5.触针TCP的设定
在对跟踪坐标系的设定、相机标定、传感器位置/托盘位置设定的过程中都需要使用触针TCP进行设定。如果有多台机器人,需要所有机器人都进行该作业。由于触针一旦卸下后,如果无法保证能够正确地重新安装到机器人上,则设定的TCP无效,需要重新进行TCP设定。因此,在机器人程序的位置示教之前,建议机器人一直保持安装触针的状态。
6.机器人工作单元的设定
在完成硬件的连接和设置后,需对iR PickTool中的参数(机器人、传送带、固定工作站等)进行设置。iR PickTool 的设定可在工作单元内的任意机器人控制器上进行。但是不能同时在2台控制器上进行iR PickTool的设定。
7.视觉程序的示教
(仅视觉跟踪,队列管理跟踪时不需要该步骤)
在进行视觉跟踪时,需要对相机进行设定和标定工作。在完成标定工作后,需要完成视觉程序的示教。
8.机器人程序的示教
在视觉模板中基准位置设定后,可进行机器人的位置示教工作,编写具有跟踪动作的机器人程序。如安装有iR PickTool Plug & Play模块时,系统中将带有标准TP程序。
9.追踪动作的微调
基本动作示教结束后,需要对各个机器人分别进行微调。在跟踪程序拾取位置之后,输入待机指令。机器人运动至拾取工件的位置正上方后,停止传送带,暂停程序。确认机器人的位置和工件位置的偏移量。如有偏移,点动机器人移动至正确位置,并将正确位置输入机器人中。
在使用相机检出工件时,如果相机认识的跟踪坐标系和各个机器人认识的跟踪坐标系有偏移,则跟踪动作会发生错误。该误差会以“如果工件不旋转,则补偿正确,如果工件旋转,则发生偏移”的形式发生。此时可以通过ADJ_OFS程序进行补偿,对机器人的拾放精度进行补偿。
转载于:机器人在线
更多:发那科机器人
